The Mission Exchange Model: Advancements in Autonomous Vessel Operations
The Mission Exchange Model (MEZ) represents a significant advancement in the operation of autonomous vessels on inland waterways (IWW), developed as part of the AUTOFLEX project. This model establishes a structured communication framework between the Remote Operation Centre (ROC) and the onboard Autonomous Navigation System (ANS), ensuring that autonomous vessels can navigate complex waterways efficiently and safely. Even if an Unmanned Surface Vehicle (USV) can operate on its own and might be capable of making decisions for most use cases a ROC operator monitoring or acting as a fall-back option is often needed if not mandatory.
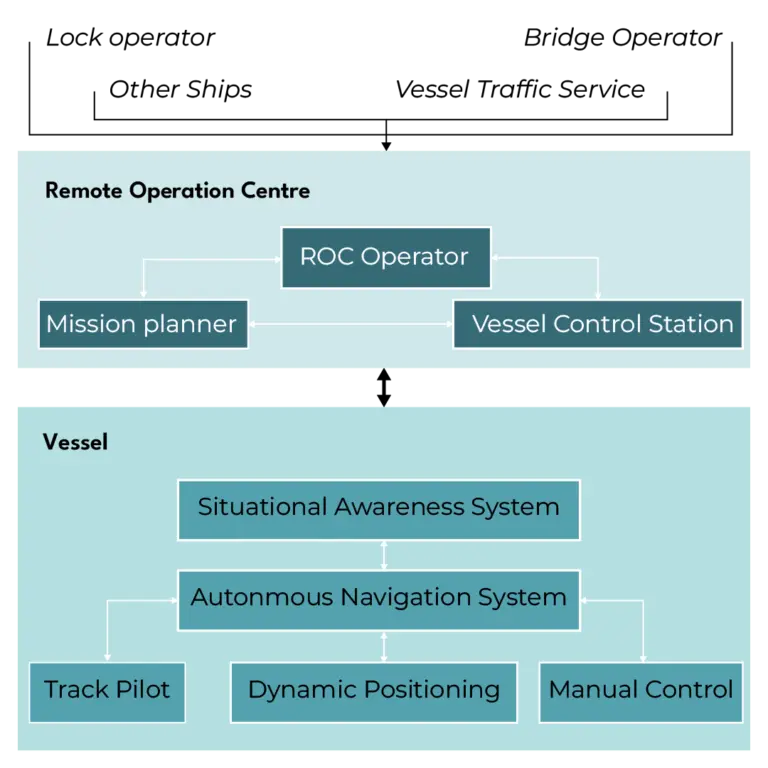
Role of the Remote Operation Centre
Central to the MEZ is the ROC operator, who is responsible for planning the vessel’s mission. This planning involves outlining critical details such as the route, waypoints, planned speed over ground, time schedules, and cross-track distances for each leg of the journey. Additionally, the ROC operator must provide information regarding the navigation of locks and bridges. Moreover, the ROC operator needs to specify when the ANS should notify the ROC about particular situations that may require human intervention.
Once the mission has been defined, the ROC operator creates a Mission Exchange Message according to the MEZ standards. This message is then transmitted to the ANS via the ROC’s communication interface. The ANS is tasked with validating this mission data, ensuring that it can execute the planned operations effectively. Upon validation, the ANS sends an approval back to the ROC operator, signalling that the mission is ready for execution
Components of the Mission Exchange Model
The MEZ consists of two primary components:
Mission Planning Data: This data is sent from the ROC to the ANS and includes crucial information necessary for the mission’s execution:
- Planned route and actions
- Planned schedule
- Mooring details
- Applied level of autonomy
- Cargo specific
Mission Execution Data: This data is transmitted from the ANS back to the ROC during the vessel’s operation. It provides real-time updates on the vessel’s status, environmental conditions, and any deviations from the planned mission.
This bi-directional flow of information ensures that both the ROC and ANS remain aligned throughout the vessel’s journey.
Demonstration of the MEZ
A notable practical application of the MEZ was demonstrated by Maritime Robotics during the AUTOFLEX project in Norway. The USV OtterX was utilised as an ANS to validate the navigation process in a controlled environment, in a small canal in Trondheim. During this demonstration, the ROC operator oversaw the mission’s execution, ready to react or even intervene when necessary.
The demonstration involved several action points where the OtterX needed to communicate with the ROC. For instance, upon reaching the first action point, the vessel notified the ROC that it required contact with the bridge operator to negotiate for an opening. The ROC operator then coordinated the bridge opening, ensuring that the vessel could proceed safely.
Following this, the OtterX continued to the next action point, stopping to hold its position until receiving confirmation from the ROC to resume navigation. This sequence of events illustrated the effectiveness of the MEZ in facilitating communication and coordination between autonomous systems and human operators.
More information and a detailed overview of MEZ functionalities are available from ‘A Mission Exchange Model (MEZ) for Autonomous Inland Waterway Navigation’ by Hagaseth et. al.
Upcoming Developments
Looking ahead, a full-scale demonstration of the MEZ is planned for the Ghent-Terneuzen canal, which will involve a complete Mission Exchange Message implementation. This upcoming event will utilise a full-scale inland vessel as ANS, allowing for a more comprehensive assessment of the MEZ in real-world conditions. The focus will be on validating the navigation according to the mission, ensuring that the model can effectively support autonomous operations in a variety of scenarios.
As the AUTOFLEX project progresses, the Mission Exchange Model is poised to play a vital role in enhancing the operational capabilities of autonomous vessels. By integrating human oversight with advanced navigation technologies, the MEZ aims to ensure safe and efficient navigation on inland waterways, paving the way for broader adoption of autonomous maritime systems.