AUTOFLEX at Inland Ports Innovation Days, Duisburg
AUTOFLEX was represented at the Inland Ports Innovation Days (11–12 February 2026) in Duisburg, hosted by the MultiRELOAD project, bringing together leading experts and stakeholders from across Europe to discuss the future of inland port operations and digital transformation in inland waterways. Cyril Alias (DST) presented on AUTOFLEX’s approach to autonomous inland shipping, while Kristoffer […]
AUTOFLEX D4.3: Uncrewed Vessel Basic Design – Oskar 2.0 – 3D – MODEL
AUTOFLEX D4.3: Uncrewed Vessel Basic Design – Oskar 2.0
Deliverable D4.3 presents the basic design and hydrodynamic optimization of the AUTOFLEX vessel, building on the concept from Task 4.2 to create “Oskar 2.0” – a refined, energy-efficient design validated through numerical simulations and physical model testing. Design Development and Optimization Methodology The design evolved through a multi-stage optimization process: Hull Form Optimization involved two […]
Mission Exchange Model
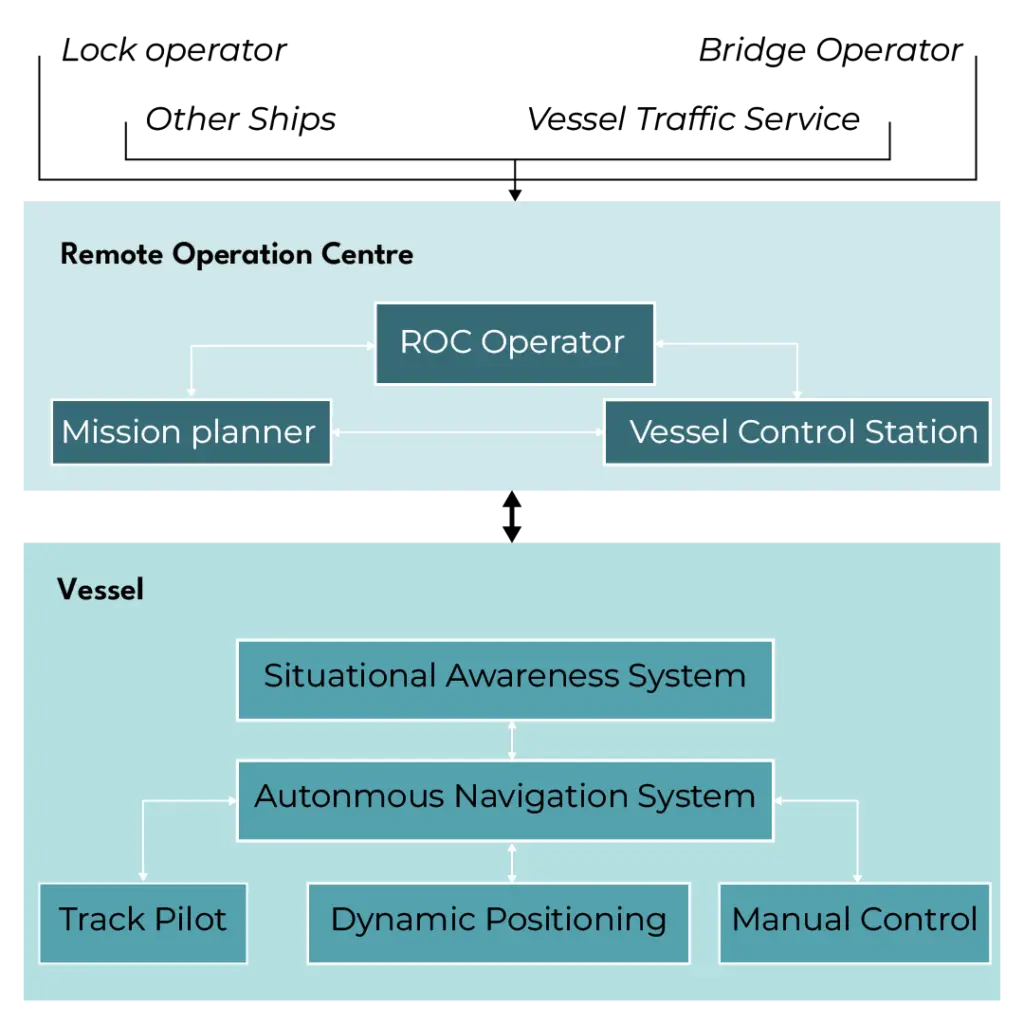
The Mission Exchange Model: Advancements in Autonomous Vessel Operations The Mission Exchange Model (MEZ) represents a significant advancement in the operation of autonomous vessels on inland waterways (IWW), developed as part of the AUTOFLEX project. This model establishes a structured communication framework between the Remote Operation Centre (ROC) and the onboard Autonomous Navigation System (ANS), […]
OtterX Demonstration

Succesful Demonstration by partner Maritime Robotics Maritime Robotics has reached an important milestone in autonomous vessel development. The Otter X successfully executed an autonomous mission through the Trondheim canal, including passage through the Skansen Bridge—completely uncrewed and managed remotely from our ROC. The operation validated the AUTOFLEX autonomy control loop: mission planning, route execution, live […]
SeaGuard Tool
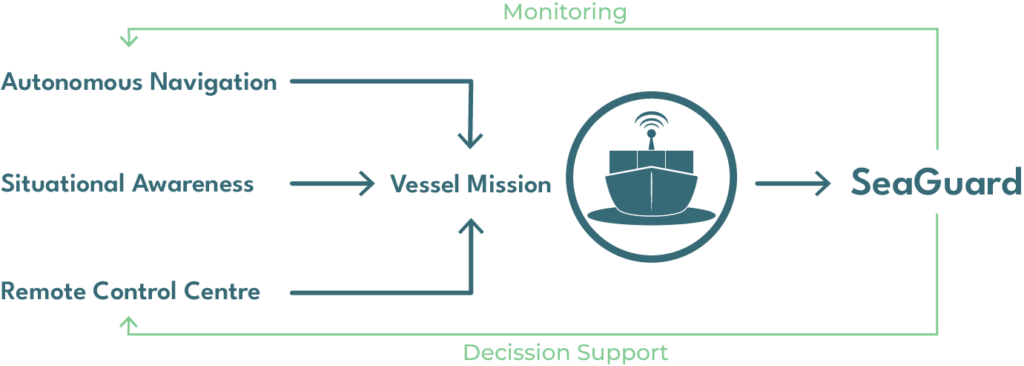
Introducing SeaGuard, a cutting-edge software tool developed by NTUA as part of the AUTOFLEX project. Designed to ensure the safety, security, and resilience of autonomous vessels, SeaGuard offers real-time monitoring and risk management for automated fleets, particularly in confined environments like inland waterways.